



金沢大学理工研究域フロンティア工学系の関啓明教授と自然科学研究科博士後期課程のThaelasutt Tugeumwolachotさんらの研究グループは,人が入れないさまざまな直径の下水管内で,詰まりの除去や菅の補修など,複雑な作業に使用できるパイプメンテナンスロボットを開発しました。
下水管は,私たちの生活に欠かせないインフラの一部であり,その機能維持のためには定期的なメンテナンスが必要です。しかしながら,下水管にはさまざまな大きさのものがあり,人が入れないような細い管も多いため,その維持管理には多大な労力やコストがかかります。その課題解決のためには,管内の堆積物や侵入した街路樹の根などを除去したり,老朽化した管を補修したりする作業を遠隔で行うことができるロボットの開発が期待されています。しかし,現在,そのようなロボットは,カメラでの調査や点検といった目的にとどまっているものが一般的です。一部,補修作業のできるロボットもありますが,大きな管内でしか作業できなかったり,複雑な作業ができなかったりします。
本研究では,前方や菅の周方向などさまざまな方向に向けられる切削アームを用いて,閉塞物や堆積物を効果的に取り除くことができる小型ロボットを開発しました。このような管内作業ロボットを設計する際には,さまざまな方向に切削工具を押し出すことができ,かつ,大きな切削の力にも負けない複雑なアーム機構をいかにコンパクトに設計するか,また,さまざまな直径の菅の中にロボットをいかにしてぴったりとフィットさせるかがポイントとなります。本研究で開発されたロボットは,アームの中にモータを納めずに,本体側の複数のモータから歯車をうまく組み合わせて駆動することで多自由度な切削アームを実現しています。また,6本の同時に折り畳み可能な「クローラー」アームをロボット本体の周囲に配置し,この調節可能な移動機構により,内径15〜31cmの下水管の中で作業することができます。
本研究の成果によって,狭い下水管内での複雑な遠隔作業が可能になります。今後は,さらにロボットのパワーを増大させたり自動化させたりすることで,メンテナンス作業を効率化し,ますます増えていくインフラの老朽化への対応に貢献することが期待されます。
本研究成果は,2021年8月27日に国際学術誌『Artificial Life and Robotics』のオンライン版に掲載されました。
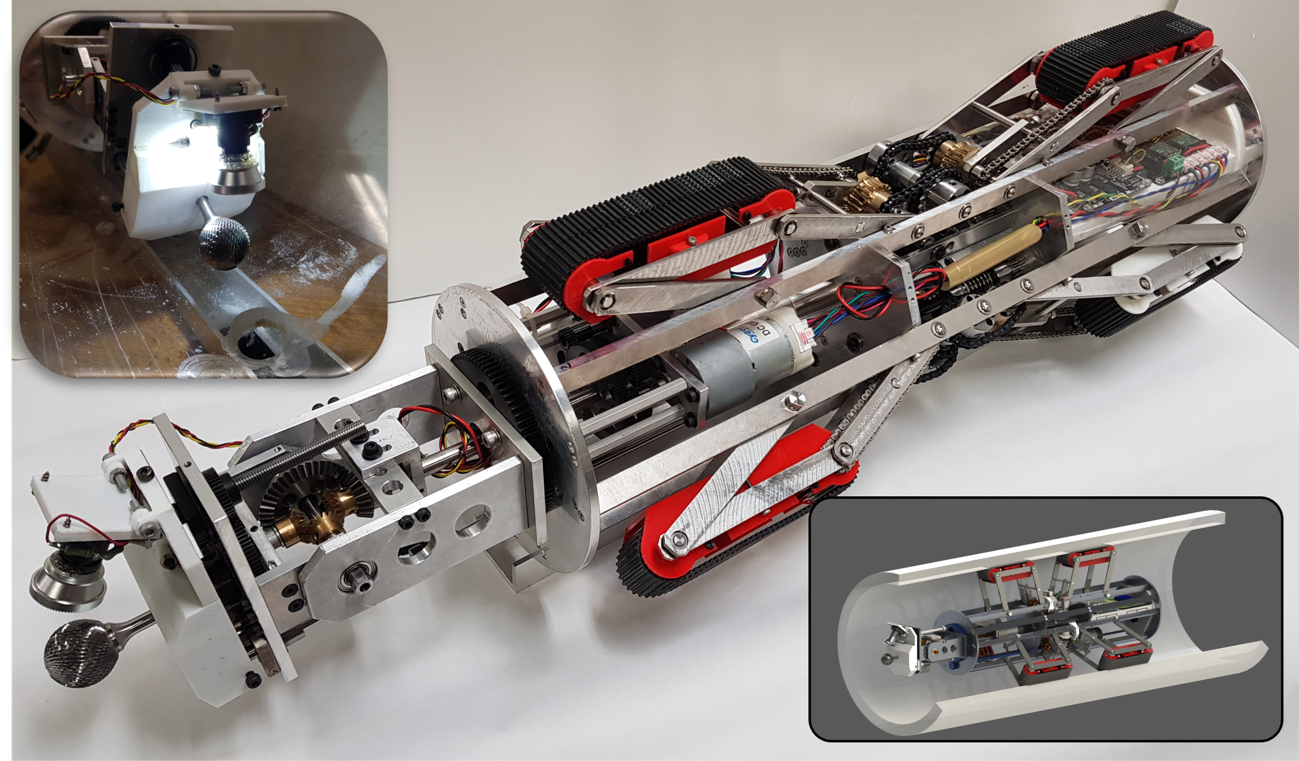
開発したパイプメンテナンスロボット
球状の切削工具をいろいろな方向に向けて押し出すアーム機構と,クローラを折りたたんだり拡げたり(右下図)することで管内にフィットする移動機構から構成されている。左上図は,切削工具で菅の内壁に穴をあけたときの様子。