



金沢大学理工研究域フロンティア工学系の渡辺哲陽教授らの研究グループは,製造現場等で広く活用される工業用ロボットのロボットハンドによる物体のハンドリングについて,摩擦が大きく柔らかな指先の動作を模す装置を作成し,無水エタノールを潤滑剤として作用させることで,つかんでいた物体を放す制御方法を開発しました。
物体をつかみ,正しい場所で放すことは,ロボットの作業として重要なことの一つです。表面に摩擦の大きな物質を用いることで物体をつかむことは容易になる一方,物体を放すことは困難になります。作業スペースが小さく,動きが制限される場合には,物体をつかむ動作と放す動作の両方を実現することは一層難しくなります。本研究グループは,このような作業を可能にする高い摩擦を持つロボットハンドの指先装置を開発してきました。
本研究では,さまざまな予備実験を踏まえ,無水エタノールを潤滑剤として付加することで摩擦力を制御し,ロボットハンドの指先を動作させることなく,物体を放すことができることを解明しました。また,物体が乾いた状態であっても水で濡れている状態であっても無水エタノールが有効であることを立証しました。
本研究成果は,とりわけ狭い空間でのロボットハンドによる作業の可能性を広げるものであり,さらなる多様な実験条件の下で潤滑剤の効果を検証することにより,その可能性を高めていくことが期待されます。
本研究成果は,2019年4月24日に日本ロボット学会欧文誌『Advanced Robotics』 のオンライン版に掲載されました。
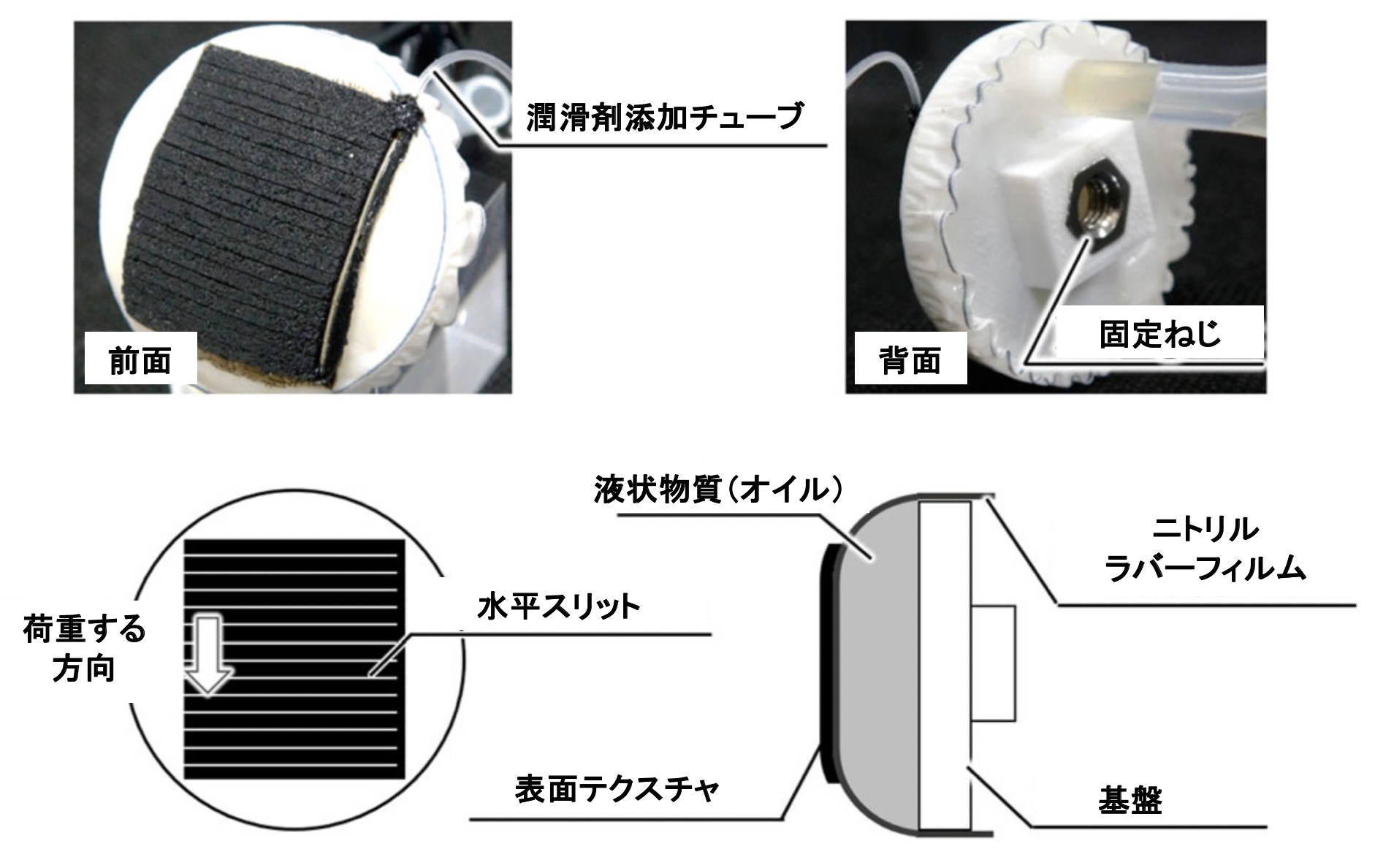
図1. 表面テクスチャをはったロボット指先
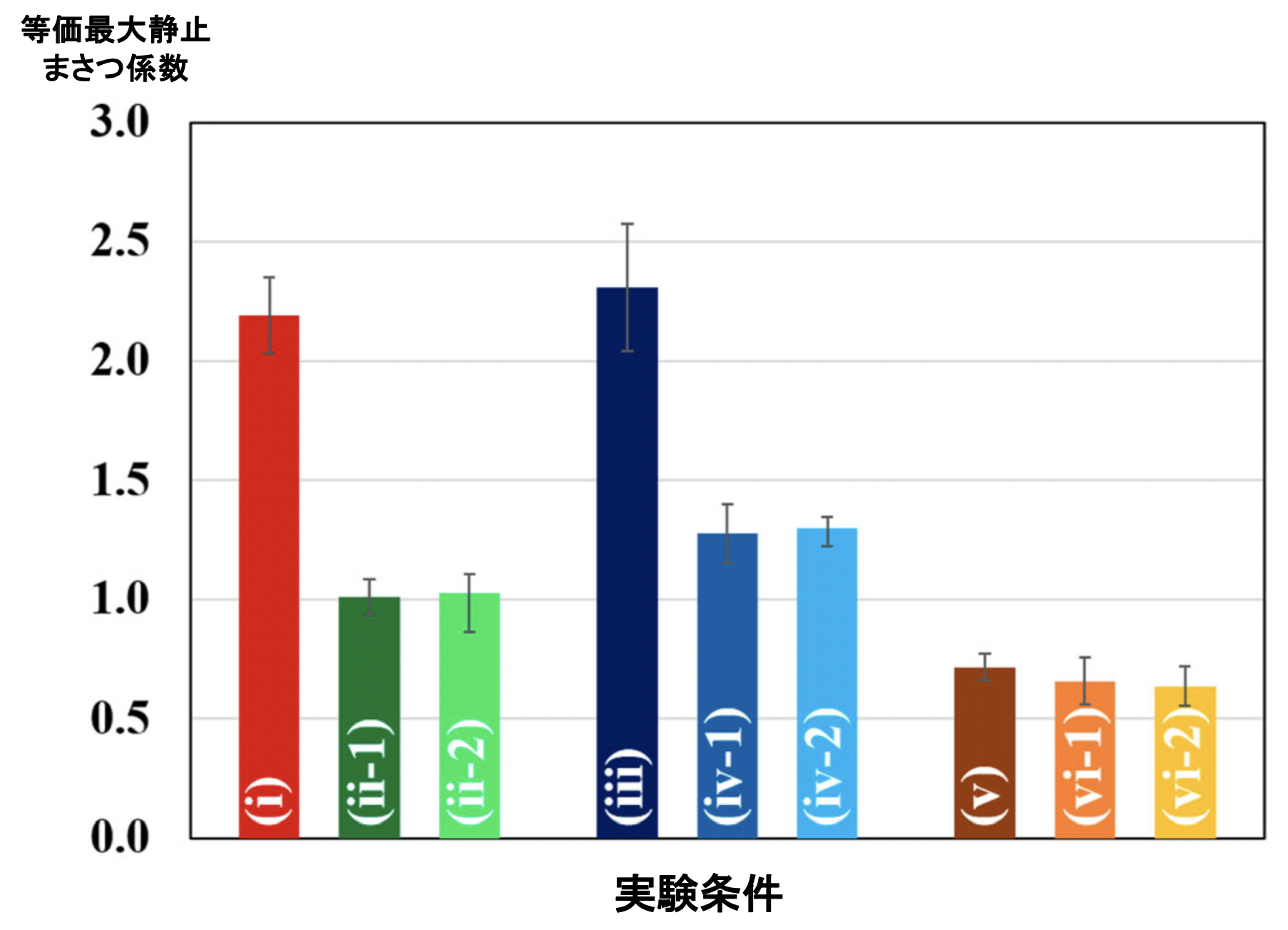
図2. いくつかの実験条件下での等価最大静止まさつ係数(※)
図1に示すロボットハンド指先でポリプロピレン物体をつかみ,等価最大静止まさつ係数を計測して潤滑剤の効果を調べると,ドライ条件でもウェット(水)条件でも,潤滑剤の効果がみられた。(i) ドライ条件下,(ii-1) ドライ条件で,つかむ前に潤滑剤を添加,(ii-2) ドライ条件下で,つかんだ後に潤滑剤を添加,(iii) ウェット(水)条件下,(iv-1) ウェット条件下で,つかむ前に潤滑剤を添加,(iv-2) ウェット条件下で,つかんだ後に潤滑剤を添加,(v)オイル条件下,(vi-1)オイル条件下で,つかむ前に潤滑剤を添加,(vi-2)オイル条件下で,つかんだ後に潤滑剤を添加。
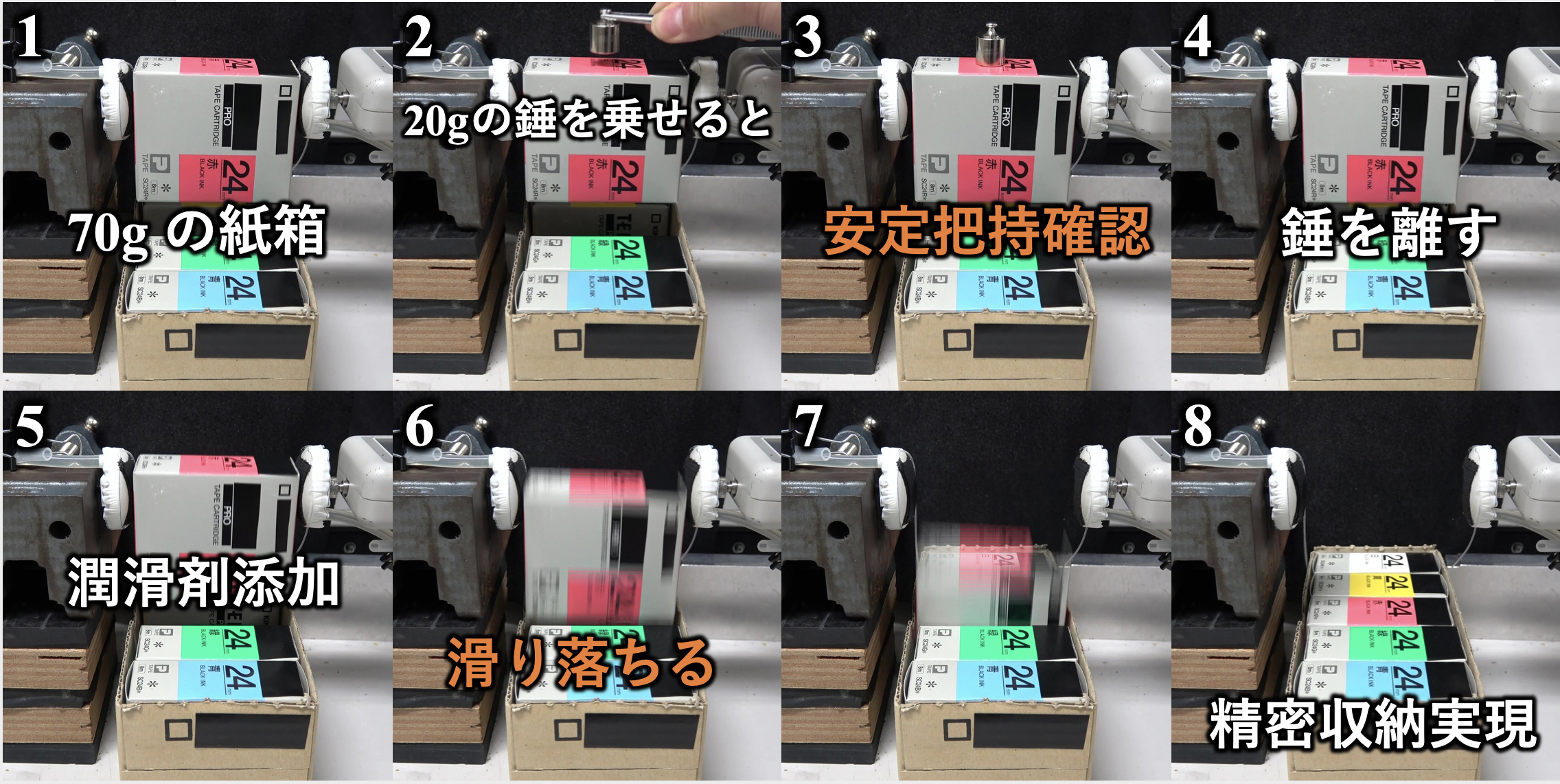
図3. 開発したロボットによる箱へのパッキング作業
左右のロボット指先で70gの箱をつかんだ後,20gの分銅を乗せてしっかりとつかめていることを確認。続いて,分銅を取り外し,潤滑剤を添加すると,つかんだ箱は滑り落ちて下の大きな箱に入り,箱への精密パッキングが完了した。
【用語解説】
※ 等価最大静止まさつ係数
相対運動を行っていない状態での,二つの物体の接触面に生じる最大せん断力と接触面に直角に作用する力との比をいう。なお,最大せん断力には摩擦力と接触面の変形により生じる弾性力が含まれる。
研究者情報:渡辺 哲陽