



理工研究域電子情報学系の八木谷聡教授は,株式会社日立製作所との協同で,自動運転機器の誤作動の原因となる電磁ノイズ(※1)の発生源を特定可能な小型センサーを開発しました。
近年,IoTの進展に伴い,自動車や鉄道車両などに搭載されている機器と関連システムとのデータ連携や,自動運転化に向けた取り組みが加速しています。長期にわたり機器やシステムの信頼性や安全性を確保するためには,機器の高信頼化に加え,正常なセンサーデータの取得が不可欠です。しかし,経年劣化した機器や集積した電子機器からは,低周波数帯域の電磁ノイズが漏れ,周囲の信号やセンサーデータを欠落させて,機器やシステムの誤作動を引き起こす可能性があります。
現在,低周波数帯域の電磁ノイズの発生源を特定する技術としては,無線通信に利用される,高周波数帯域の方向推定手法(※2)を応用する方法と,ポインティングベクトル(※3)による方向推定手法があります。しかし,高周波数帯域の方向推定手法を用いる場合,センサーの大型化もしくは広範囲にセンサーを設置する必要があるなど,実際に自動運転機器向けに活用することは困難でした。また,ポインティングベクトルによる方向推定手法は,電界,もしくは磁界のいずれかを測定し,もう一方の値を数値変換により求めることで発生方向を推定する手法のため,実際の方向とは45度程度の角度誤差(※4)が生じてしまうことから,電磁ノイズ発生源の正確な特定はできませんでした。
そこで,八木谷教授らは,低周波数帯域の電磁ノイズの発生源を高精度に特定するため,ポインティングベクトルの手法を応用し,同一地点で,3次元の電界と磁界を同時計測する小型センサーを開発しました。同センサーの特長は以下のとおりです。
1.ループアンテナ(※5)を2つ並べた対の構造により,電界と磁界の同時計測が可能
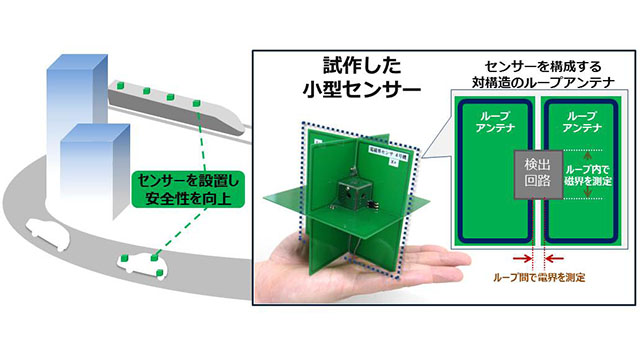
従来,磁界の計測にのみ使用されていたループアンテナを,同一平面上に2つ並べた対の構造とすることで,ループアンテナ間で発生する電界の同時計測が可能になりました。
2.3対のループアンテナが交わる構造により,センサーの精度向上と小型化を実現
対になったループアンテナを3つ組み合わせ,中心の電磁ノイズ検出回路がデータを一括取得する構造とすることで,電界と磁界のデータを同時に,縦・横・奥行き方向の3次元で取得可能になりました。ループアンテナが直交する構造のため,互いに干渉することなく計測精度を向上できたほか,対構造のループアンテナの中心部に検出回路を集約できたため,センサーを110mm四方に小型化することができました。
今回開発したセンサーを用いて,200kHz~10MHzの低周波数帯域の電磁ノイズの方向推定を行った結果,実際の方向と2度以下の誤差で検知可能であることを確認しました。これは,センサーから発生源までの距離が3mの場合,10cm以下の誤差です。センサーを3個用いることで,推定した方向の3点が交わる箇所を,電磁ノイズの発生源として特定可能であることから,その部分の対策や修理を実施することで,機器の誤作動を未然に防ぐことができます。また,センサーの小型化実現により,自動車や鉄道車両などへ複数のセンサーも設置と可能となりました。
今後は,本センサーを活用した,自動運転機器の誤作動予防システムの構築などを通じて,社会インフラの安全性向上に貢献していきます。
【用語解説】
※1 電磁ノイズ::
電子機器の回路や電源などから発生する微弱な電磁波。周囲の電波への干渉や,センサーデータの欠落などを引き起こし,通信障害や電子機器の誤作動の要因となる。
※2 高周波数帯域の方向推定手法::
代表的なものに,受信センサーでの電磁波の遅延(位相差)を検知する手法と電波レンズを用いる手法がある。遅延を検知する手法は,複数の受信センサーを波長の半分程度の距離ごとに配置する必要があり,電波レンズを使用する方式では,電波レンズ自体が波長以上のサイズが必要である。そのため,例えば1MHzの低周波電磁波の場合,150mおきにセンサーを配置するか,センサー自体が300m以上の大きさになる。
※3 ポインティングベクトル:
電磁波の方向とエネルギー量を示すベクトル
※4 45度程度の角度誤差:
センサーから発生源までの距離が3mの場合,3m程度の位置誤差が発生する。
※5 ループアンテナ:
金属などの導線を環状(ループ)にしたアンテナ