


Abstract:
Amid the inevitable spread of automated vehicles, engineering researchers centered at Kanazawa University (Japan) tackled the challenge of traffic and arrow light recognition and response for such vehicles. They developed an algorithm that works with sensors and high-definition digital maps to situate the vehicle so it can intuit the relevant lights and attune its speed. The system held up under urban simulations and paves the ways for safer automated driving.
Kanazawa, Japan – As automated driving expands, automated vehicles must have systems that function in harmony with existing infrastructure and deal with the complexity of urban landscapes. Traffic lights, for instance, come in different shapes, sizes, and places; present multiple symbolic colors; and have arrows indicating direction. For a driverless vehicle to work safely, it must discern these lights at a distance, interpret them, and react accordingly, all in a very short time window. The challenge calls for inventive approaches.
Researchers centered at Japan’s Kanazawa University have now developed novel methods that reliably help automated vehicles deal with the complexities of traffic and directional arrow lights in urban areas. The system enables vehicles to pick out traffic lights up to 150 meters away, and slow down or adjust smoothly and naturally. The research was published in the journal Sensors.
Automated vehicles face special challenges in urban areas full of vehicles, pedestrians, and various objects. This is often dealt with using sensors to estimate position and using high-definition digital maps that provide the exact location of unmoving road objects. These help the vehicle intelligently change its position or speed based on where it is and what’s going on around it.
Amid all these choices, successfully navigating traffic lights is critical.
“For automated vehicles to react safely, they have to spot traffic lights from at least 100 meters away,” study co-author Ryo Yanase says. “We created a unique algorithm used with a digital map to identify relevant traffic lights and then calculate the necessary acceleration or deceleration. We also found a way to help vehicles spot distant arrow lights better than most humans are capable of.”
Picking out traffic lights over such distances may seem a relatively simple matter of using a high-resolution or telephoto lens. But these can increase processing time and narrow the view when quick decision-making and a wide field of vision are critical. The digital map-based algorithmic solution works with sensors to plot the vehicle’s position and “region of interest” containing traffic lights as it approaches an intersection.
The system is not overly intensive, so a vehicle’s central processing unit (CPU) can handle the approach in real time. The researchers subjected their method to a range of urban driving conditions to see how it held up. Even from 150 meters, the system proved capable of identifying lights and adjusting speed comfortably.
“We successfully created and verified two valuable achievements,” study lead author Keisuke Yoneda says. “For one, we realized traffic light detection and response at long distances, with few false-positive detections, and with a manageable CPU load. For another, our system was able to recognize small arrow objects, even those less than 10 pixels in size.”
These results will contribute to technology essential for making automated vehicles safe and functional among other vehicles, pedestrians, and the many objects in busy urban areas.
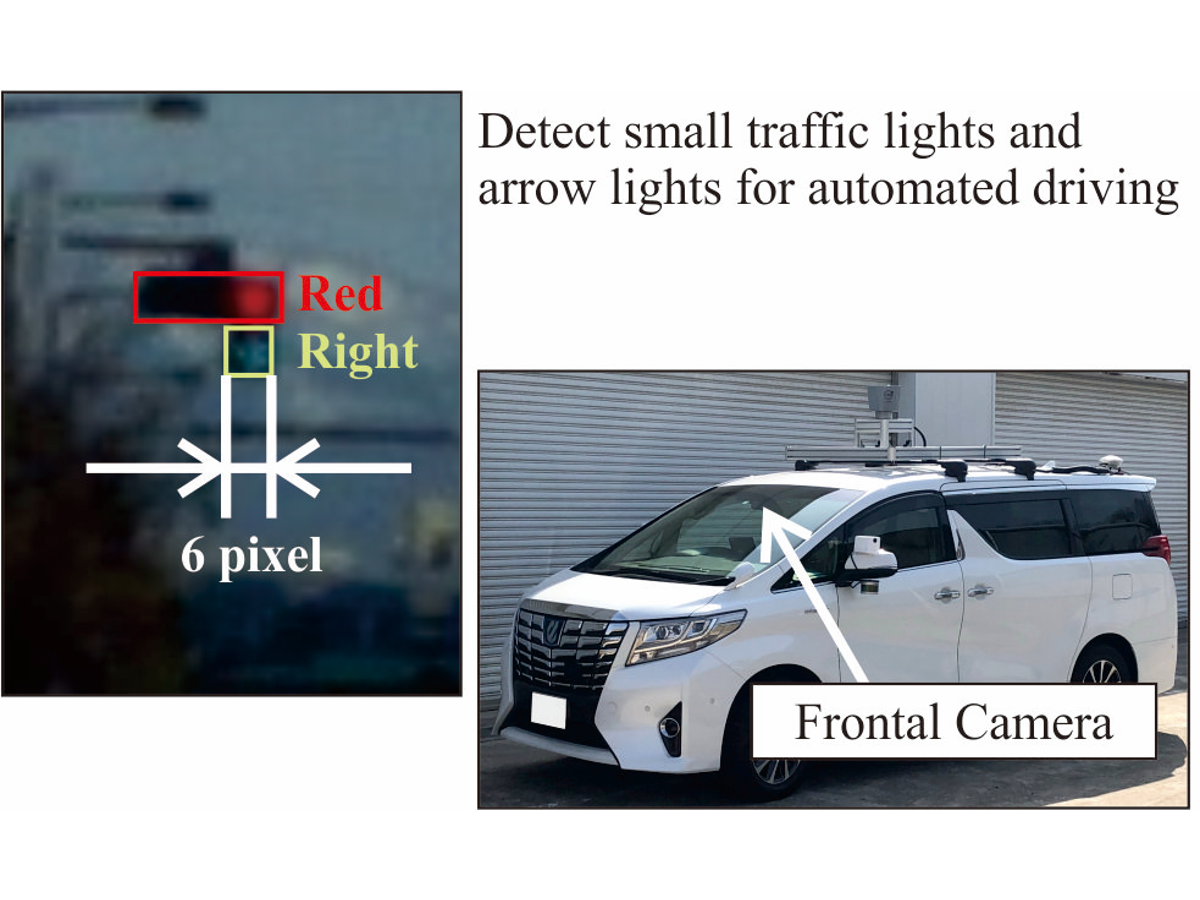
Figure1
Traffic light and arrow light detection for automated vehicle
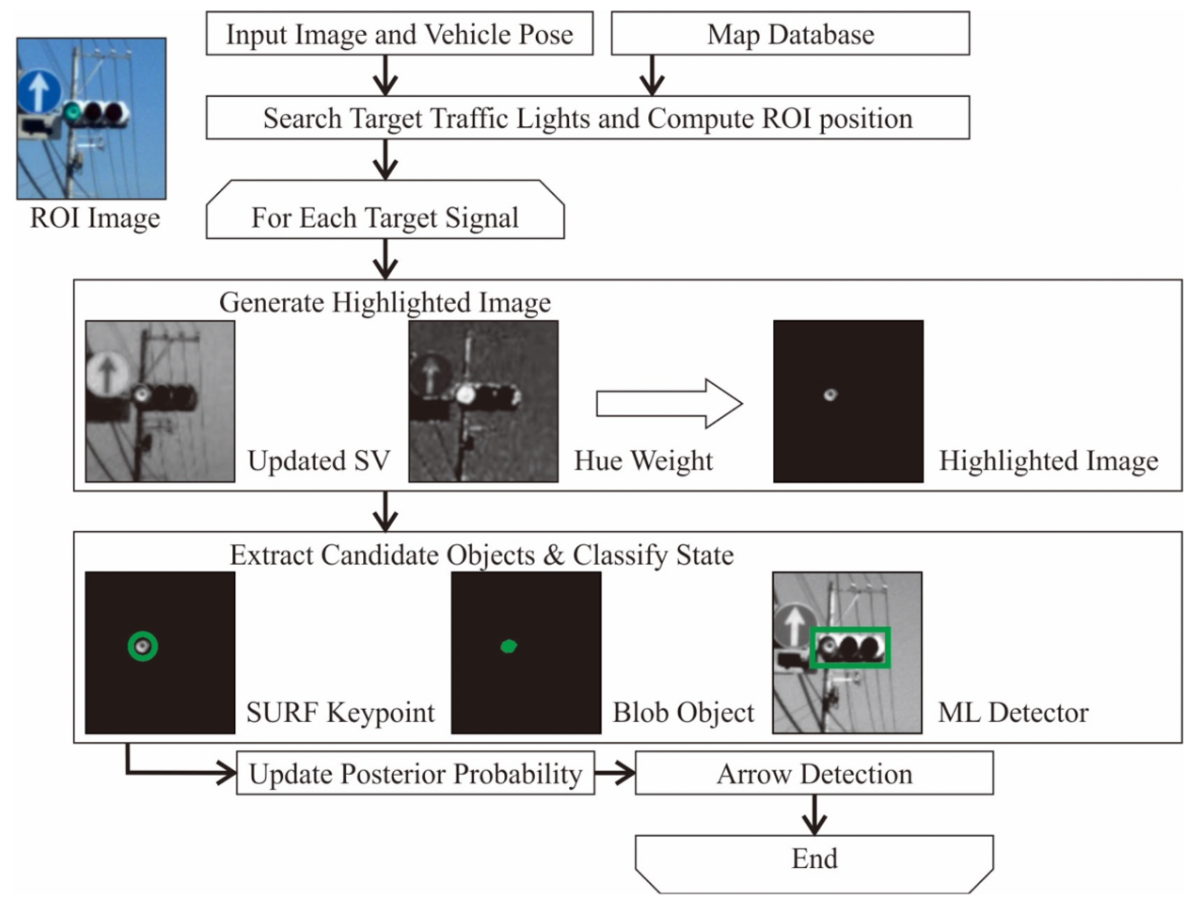
Figure2
Flowchart of Traffic light detection using Digital map
Article
Robust Traffic Light and Arrow Detection Using Digital Map with Spatial Prior Information for Automated Driving
Journal:Sensors
Authors:Keisuke Yoneda, Akisuke Kuramoto, Naoki Suganuma, Toru Asaka, Mohammad Aldibaja and Ryo Yanase
DOI: 10.3390/s20041181
Funder
This work was supported by Council for Science, Technology and Innovation(CSTI), Cross-ministerial Strategic Innovation Promotion Program (SIP), “Research and development for recognition technologies and other technologies necessary for automated driving technologies (levels 3 and 4)” (funded by NEDO).